ManhattanSLAM: Robust Planar Tracking and Mapping Leveraging Mixture of Manhattan Frames
Abstract:
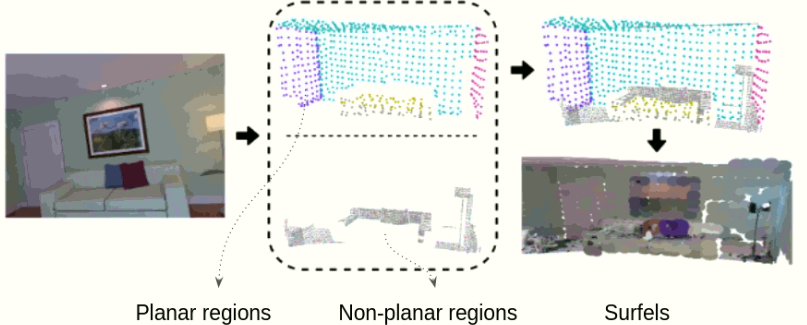
In this paper, a robust RGB-D SLAM system is proposed to utilize the structural information in indoor scenes, allowing for accurate tracking and efficient dense mapping on a CPU. Prior works have used the Manhattan World (MW) assumption to estimate low-drift camera pose, in turn limiting the applications of such systems. This paper, in contrast, proposes a novel approach delivering robust tracking in MW and non-MW environments. We check orthogonal relations between planes to directly detect Manhattan Frames, modeling the scene as a Mixture of Manhattan Frames.