News:
- 21, Feb. One paper is accepted to CVPR 2026 (Findings)
- 7, Feb. Serve as AE for IROS 2026
- 31, Jan. One paper is accepted to ICRA 2026 in Alias-free Gaussian Splatting SLAM.
- 23, Jan. Serve as Session Co-Chair for 3D Computer Vision 1&2 for AAAI-26
📅 2025
- 8, Nov. Two Oral papers are accepted to AAAI 2026 in RiemanLine Parametrization and Active3D. [Source Code|Paper] of RiemanLine, [Project Page] of Active3D.
- 26, Oct. Chaired the Online Session 3 – Digital Image Processing and Applications at IEEE ICRCV.
- 11, Oct. Appointed as an Associate Editor of IEEE Robotics and Automation Letters (RA-L). Looking forward to working with the great editorial board and contributing to the robotics community!
- 19, Sep. One paper is accepted to NeurIPS 2025: 4D3R: Motion-Aware Neural Reconstruction and Rendering of Dynamic Scenes from Monocular Videos.
- 18, Aug. The review process of IROS2025 Workshop AIR4D was completed. Looking forward to seeing you in Hangzhou!
- 6, Aug. Our New arXiv paper: Riemannian Manifold Representation of 3D Lines for Factor Graph Optimization. [Paper | Code] can be obtained.
- 27, June. Three papers are accepted to ICCV 2025 in 4D SLAM; Scene Graph Prediction; Autonomous Driving Gaussian Splatting.
- 25, June. One paper is accepted to Computers & Graphics.
- Invited to give a talk at Tianjin University on June 3, 2025: Accurate Localization and Scene Reconstruction in 4D Space.
- 9, May. We're excited to announce that the 1st Workshop on Advancements for Intelligent Robotics in 4D Scenes: Localization, Reconstruction, Rendering, and Generation will be held in IROS 2025 (Hangzhou, China): Website
- 15, April. Our paper: SE (3)-Equivariance Learning for Category-level Object Pose Estimation (Paper) is accepted to IEEE TIM 2025.
- 20, March. Our new arXiv paper: 4D Gaussian Splatting SLAM (Paper) can be obtained.
- 11, March. Our new arXiv paper: Robust Surface Reconstruction (Paper) can be obtained.
- 26, Fed. Our paper: Learnable Infinite Taylor Gaussian for Dynamic View Rendering (Paper) is accepted to CVPR2025.
- 28, Jan. Our paper: Lifelong Localization using Adaptive Submap Joining and Egocentric Factor Graph (Paper&Code) is accepted to ICRA2025.
- 13, Jan. Our new paper is accepted to IEEE Sensors Journal
📅 2024
- Our new paper, ShapeMaker, is accepted to CVPR2024.
- Our New arXiv paper (28.Nov.2024): SmileSplat: Generalizable Gaussian Splats for Unconstrained Sparse Images (Project) can be obtained.
-
Our Paper (27.Nov.2024) got accepted for publication in IEEE TIM:
- Accurate Visual Odometry by Leveraging 2DoF Bearing-Only Measurements
- Our New arXiv paper (01.Oct.2024): Robust Gaussian Splatting SLAM by Leveraging Loop Closure (Paper) can be obtained.
- Our new paper, Open-Structure (Paper | Code), is accepted to RA-L2024.
- Our new paper, GeoGaussian (Project Website), is accepted to ECCV2024.
- I joined the CVRP group at NU Singapore as a Postdoc Research Fellow advised by Prof. Gim Hee Lee from June, 2024.
Selected Publications (Google Scholar, GitHub):
*Equal contribution †Corresponding author
Name Update: I previously published under the name Yanyan Li.
All works under that name refer to the same author.
-
Active3D: Active High-Fidelity 3D Reconstruction via Hierarchical Uncertainty Quantification

- Yan Li, Yingzhao Li, Gim Hee Lee. @ AAAI 2026 (Oral)
- [Project Page]
-
RiemanLine: Riemannian Manifold Representation of 3D Lines for Factor Graph Optimization
- Yan Li, Ze Yang, Keisuke Tateno, Federico Tombari, Liang Zhao, Gim Hee Lee. @ AAAI 2026 (Oral)
- [Paper] [Code]
-
4D Gaussian Splatting SLAM
- Yanyan Li, Youxu Fang, Zunjie Zhu, Kunyi Li, Yong Ding, Federico Tombari. @ ICCV 2025
- [Paper] [Project Page] [Code]
-
Learnable Infinite Taylor Gaussian for Dynamic View Rendering

- Bingbing Hu*, Yanyan Li*, Rui Xie, Bo Xu, Haoye Dong, Junfeng Yao, Gim Hee Lee. @ CVPR 2025
- [Paper] [Project Page] [Code]
-
Robust Gaussian Splatting SLAM by Leveraging Loop Closure
- Zunjie Zhu, Youxu Fang , Xin Li , Chenggang Yan , Feng Xu, Chau Yuen, Yanyan Li†. @ arXiv 2024
- [Paper] [Project Page] [Code Coming Soon]
-
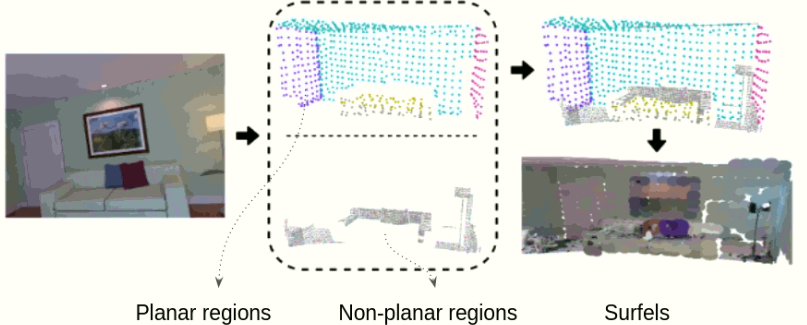
GeoGaussian: Geometry-aware Gaussian Splatting for Scene Rendering

- Yanyan Li, Chenyu Lyu, Yan Di, Guangyao Zhai, Gim Hee Lee, Federico Tombari. @ ECCV 2024
- [Paper] [Project Page] [Code]
-
Open-Structure: a Structural Benchmark Dataset for SLAM Algorithms
- Yanyan Li, Zhao Guo, Ze Yang, Yanbiao Sun, Liang Zhao, Federico Tombari. @ IEEE RA-L 2024
- [Paper] [Project Page] [Code]
-
E-Graph: Minimal Solution for Rigid Rotation with Extensibility Graphs
- Yanyan Li and Federico Tombari.
- @ ECCV 2022
- [Paper] [video]
-
ManhattanSLAM: Robust Planar Tracking and Mapping Leveraging Mixture of Manhattan Frames
- Raza Yunus, Yanyan Li†, Federico Tombari. @ ICRA 2021
- [Paper] [Code]
-
RGB-D SLAM with Structural Regularities
- Yanyan Li, Raza Yunus, Nikolas Brasch, Nassir Navab, Federico Tombari. @ ICRA 2021
- [Paper] [Code]
-
Structure-SLAM: Low-drift Monocular SLAM in Indoor Environments
- Yanyan Li, Nikolas Brasch, Yida Wang, Nassir Navab, Federico Tombari. @ IEEE RAL/IROS 2020
- [Paper] [Code]